



Periodic Motion
A motion which repeats itself identically after a fixed interval of time is called periodic motion. e.g., orbital motion of the earth around the sun, motion of arms of a clock, motion of a simple pendulum etc.
Oscillatory Motion
A periodic motion taking place to and fro or back and forth about a fixed point, is called oscillatory motion, e.g., motion of a simple pendulum, motion of a loaded spring etc.
Note Every oscillatory motion is periodic motion but every periodic motion is not oscillatory motion.
Harmonic Oscillation
The oscillation which can be expressed in terms of single harmonic function, i.e., sine or cosine function, is called harmonic oscillation.
Simple Harmonic Motion
A harmonic oscillation of constant amplitude and of single frequency under a restoring force whose magnitude is proportional to the displacement and always acts towards mean Position is called Simple Harmonic Motion (SHM).
A simple harmonic oscillation can be expressed as
y = a sin ωt
or y = a cos ωt
Where a = amplitude of oscillation.
Non-harmonic Oscillation
A non-harmonic oscillation is a combination of two or more than two harmonic oscillations.
It can be expressed as y = a sin ωt + b sin 2ωt
Some Terms Related to SHM
(i) Time Period Time taken by the body to complete one oscillation is known as time period. It is denoted by T.
(ii) Frequency The number of oscillations completed by the body in one second is called frequency. It is denoted by v.
Its SI unit is ‘hertz’ or ‘second-1‘.
Frequency = 1 / Time period
(iii) Angular Frequency The product of frequency with factor 2π is called angular frequency. It is denoted by ω.
Angular frequency (ω) = 2πv
Its SI unit is ‘hertz’ or ‘second-1‘.
(iv) Displacement A physical quantity which changes uniformly with time in a periodic motion. is called displacement. It is denoted by y.
(v) Amplitude The maximum displacement in any direction from mean position is called amplitude. It is denoted by a.
(vi) Phase A physical quantity which express the position and direction of motion of an oscillating particle, is called phase. It is denoted by φ.
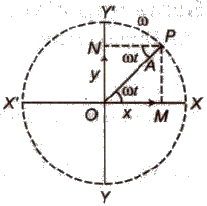
Simple harmonic motion is defined as the projection of a uniform circular motion on any diameter of a circle of reference.
Some Important Formulae of SHM
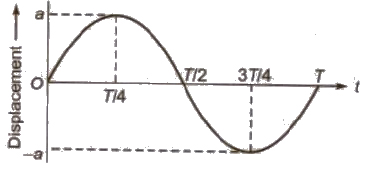
(i) Displacement in SHM at any instant is given by
y = a sin ωt
or y = a cos ωt
where a = amplitude and
ω = angular frequency.
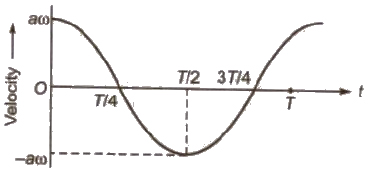
(ii) Velocity of a particle executing SHM at any instant is given by
v = ω √(a2 – y2)
At mean position y = 0 and v is maximum
vmax = aω
At extreme position y = a and v is zero.
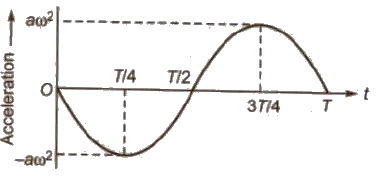
(iii) Acceleration of a particle executing SHM at any instant is given by
A or α = – ω2 y
Negative sign indicates that the direction of acceleration is opposite to the direction in which displacement increases, i.e., towards mean position.
At mean position y = 0 and acceleration is also zero.
At extreme position y = a and acceleration is maximum
Amax = – aω2
(iv) Time period in SHM is given by
T = 2π √Displacement / Acceleration
Graphical Representation
(i) Displacement – Time Graph
(ii) Velocity – Time Graph
(iii) Acceleration – Time Graph
Note The acceleration is maximum at a place where the velocity is minimum and vice – versa.
For a particle executing SlIM. the phase difference between
(i) Instantaneous displacement and instantaneous velocity
= (π / 2) rad
(ii) Instantaneous velocity and instantaneous acceleration
= (π / 2) rad
(iii) Instantaneous acceleration and instantaneous displacement
= π rad
The graph between velocity and displacement for a particle executing SHM is elliptical.
Force in SHM
We know that, the acceleration of body in SlIM is α = -ω2 x
Applying the equation of motion F = ma,
We have, F = – mω2 x = -kx
Where, ω = √k / m and k = mω2 is a constant and sometimes it is called the elastic constant.
In SHM, the force is proportional and opposite to the displacement.
Energy in SHM
The kinetic energy of the particle is K = 1 / 2 mω2 (A2 – x2)
From this expression we can see that, the kinetic energy is maximum at the centre (x = 0) and zero at the extremes of oscillation (x ± A).
The potential energy of the particle is U = 1 / 2 mω2 x2
From this expression we can see that, the potential energy has a minimum value at the centre (x = 0) and increases as the particle approaches either extreme of the oscillation (x ± A).
Total energy can be obtained by adding potential and kinetic energies. Therefore,
E = K + U
= = 1 / 2 mω2 (A2 – x2) + 1 / 2 mω2 x2
= 1 / 2 mω2 A2
where A = amplitude
m = mass of particle executing SHM.
ω = angular frequency and
v = frequency
Changes of kinetic and potential energies during oscillations.
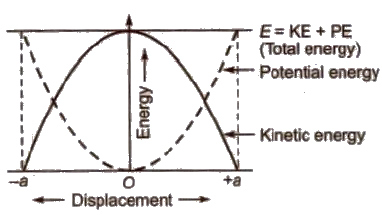
The frequency of kinetic energy or potential energy of a particle executing SHM is double than that of the frequency in SHM.
The frequency of total energy of particles executing SHM is zero as total energy in SHM remains constant at all positions.
When a particle of mass m executes SHM with a constant angular frequency (I), then time period of oscillation
T = 2π √Inertia factor / Spring factor
In general, inertia factor = m, (mass of the particle)
Spring factor = k (force constant)
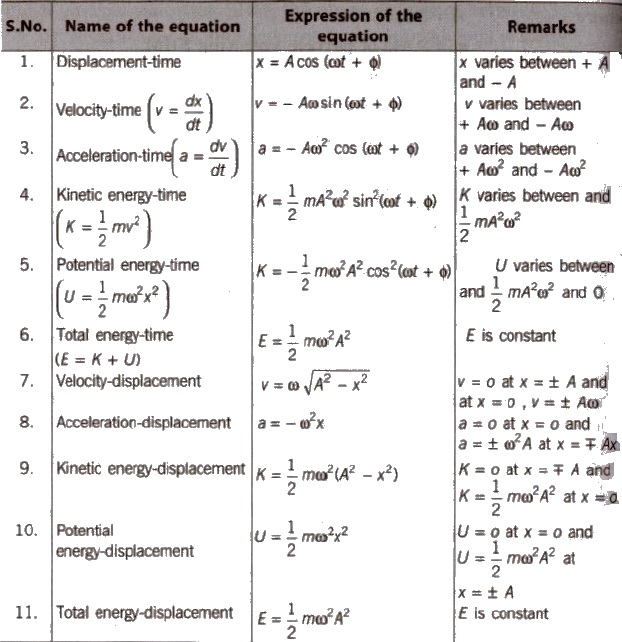
How the different physical quantities (e.g., displacement, velocity, acceleration, kinetic energy etc) vary with time or displacement are listed ahead in tabular form.
Simple Pendulum
A simple pendulum consists of a heavy point mass suspended from a rigid support by means of an elastic inextensible string.
The time period of the simple pendulum is given by :
T = 2π √l / g
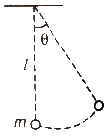
where l = effective length of the pendulum and g = acceleration due to gravity.
If the effective length l of simple pendulum is very large and comparable with the radius of earth (R), then its time period is given by
T = 2π √Rl / (l + R)g
For a simple pendulum of infinite length (l >> R)
T = 2π √R / g = 84.6 min
For a simple pendulum of length equal to radius of earth,
T = 2π √R / g = 60 min
If the bob of the simple pendulum is suspended by a metallic wire of length l, having coefficient of linear expansion α, then due to increase in temperature by dθ, then
Effective length l’ = l (1 + α dθ)
Percentage increase in time period
(T’ / T – 1) * 100 = 50 α dθ
When a bob of simple pendulum of density ρ oscillates in a fluid of density ρo (ρo < p), then time period get increased.
Increased time period T’ = T √ρ / ρ – ρo
When simple pendulum is in a horizontally accelerated vehicle, then its time period is given by
T = 2π √1 / √(a2 + g2)
where a = horizontal acceleration of the vehicle.
When simple pendulum is in a vehicle sliding down an inclined plane, then its time period is given by
T = 2π √l / g cos θ
Where θ = inclination of plane.
Second’s Pendulum
A simple pendulum having time period of 2 second is called second’s Pendulum.
The effective length of a second’s pendulum is 99.992 em of approximately 1 metre on earth.
Conical Pendulum
If a simple pendulum is fixed at one end and the bob is rotating in a horizontal circle, then it is called a conical pendulum.
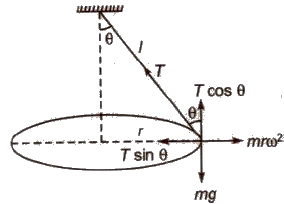
In equilibrium T sin θ = mrΩ2
Its time period T = 2π √mr / T sin θ
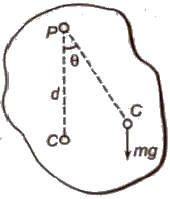
Compound Pendulum
Any rigid body mounted, so that it is capable of swinging in a vertical plane about some axis passing through it is called a physical or compound pendulum.
Its time period is given by
T = 2π √l / mg l
where, I = moment of inertia of the body about an axis passing through the centre of suspension,
m = mass of the body and
l = distance of centre of gravity from the centre of suspension.
Torsional Pendulum
Time period of torsional pendulum is given by
T = 2π √I / C

where, I = moment of inertia of the body about the axis of rotation and
C = restoring couple per unit twist.
Physical Pendulum
When a rigid body of any shape is capable of oscillating about an axis (mayor may not be passing through it). it constitutes a physical pendulum.
T = 2π √I / mgd
T = 2π √I / mgd = 2 π √l / g
Spring Pendulum
A point mass suspended from a massless (or light) spring constitutes a spring pendulum. If the mass is once pulled downwards so as to stretch the spring and then released. the system oscillated up and down about its mean position simple harmonically. Time period and frequency of oscillations are given by
T = 2π √m / k or v = 1 / 2π √k / m

If the spring is not light but has a definite mass ms, then it can be easily shown that period of oscillation will be
T = 2π √(m + ms / 3) / k
Oscillations of Liquid in a U – tube
If a liquid is filled up to height h in both limbs of a U-tube and now liquid is depressed upto a small distance y in one limb and then released, then liquid column in U-tube start executing SlIM.
The time period of oscillation is given by
T = 2π √h / g
Oscillations of a floating cylinder in liquid is given by
T = 2π √l / g
where I = length of the cylinder submerged in liquid in equilibrium.
Vibrations of a Loaded Spring
When a spring is compressed or stretched through a small distance y from mean position, a restoring force acts on it.
Restoring force (F) = – ky
where k = force constant of spring.
If a mass m is suspended from a spring then in equilibrium,
mg = kl
This is also called Hooke’s law.
Time period of a loaded spring is given by
T = 2π √m / k
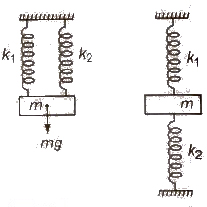
When two springs of force constants k1 and k2 are connected in parallel to mass m as shown in figure, then
(i) Effective force constant of the spring combination
k = k1 + k2
(ii) Time period T = 2π √m / (k1 + k2)
When two springs of force constant k1 and k2 are connected in series to mass m as shown in figure, then
(i) Effective force constant of the spring combination
1 / k = 1 / k1 + 1 / k2

(ii) Time period T = 2π √m(k1 + k2) / k1k2
Free Oscillations
When a body which can oscillate about its mean position is displaced from mean position and then released, it oscillates about its mean position. These oscillations are called free oscillations and the frequency of oscillations is called natural frequency.
Damped Oscillations
Oscillations with a decreasing amplitude with time are called damped oscillations.
The displacement of the damped oscillator at an instant t is given by
x = xoe– bt / 2m cos (ω’ t + φ)
where xoe– bt / 2m is the amplitude of oscillator which decreases continuously with time t and ω’.
The mechanical energy E of the damped oscillator at an instant t is given by
E = 1 / 2 kx2oe– bt / 2m
Un-damped Oscillations
Oscillations with a constant amplitude with time are called un-damped oscillations.
Forced Oscillations
Oscillations of any object with a frequency different from its natural frequency under a periodic external force are called forced oscillations.
Resonant Oscillations
When an external force is applied on a body whose frequency is an integer multiple of the natural frequency of the body, then its amplitude of oscillation increases and these oscillations are called resonant oscillations.
Lissajous’ Figures
If two SHMs are acting in mutually perpendicular directions, then due to then: superpositions the resultant motion, in general, is a curvelloop. The shape of the curve depends on the frequency ratio of two SHMs and initial phase difference between them. Such figures are called Lissajous’ figures.
1. Let two SHMs be of same frequency (e.g., x = a1 sinωt and y = a2 sin (omega;t + φ), then the general equation of resultant motion is found to be
x2 / a21 + y2 / b22 – 2xy / a1a2/sub> cos φ = sin2 φ
The equation represents an ellipse. However, if φ = O° or π or nπ, then the resultant curve is a straight inclined line.
2. Let two SHMs be having frequencies in the ratio 1 : 2, then, in general, the Lissajous figure is a figure of eight (8).

.png)


